Guest post: The Manchester robots cleaning up the world’s trickiest nuclear sites
Our partners Research impact and institutes Robotics and AI 20th June 2022
Few places in Britain are more inhospitable to humans than parts of the Dounreay nuclear site in the far north of Scotland.
Dounreay was established in the 1950s by the government as it developed nuclear reactor technology for use in future power stations. The rush to develop and test advanced reactor technologies and experiment with radioactive materials has created several highly active legacy facilities on the Dounreay site that must now be decommissioned.
The decommissioning process at Dounreay is expected to cost upwards of £2 billion, and the area will not be available for re-use for at least another 300 years.
Dounreay presents immense challenges to those trying to safely decommission the site. It is crucial to ensure the safety of everyone working there, keeping them away from dangerous environments whenever possible.
Luckily, the constantly advancing field of robotics offers an opportunity to reduce not only the costs, but also risks to the workforce, by replacing human workers with either autonomous or human-operated machines.
Researchers at The University of Manchester are doing just this at Dounreay.

Lyra’s success
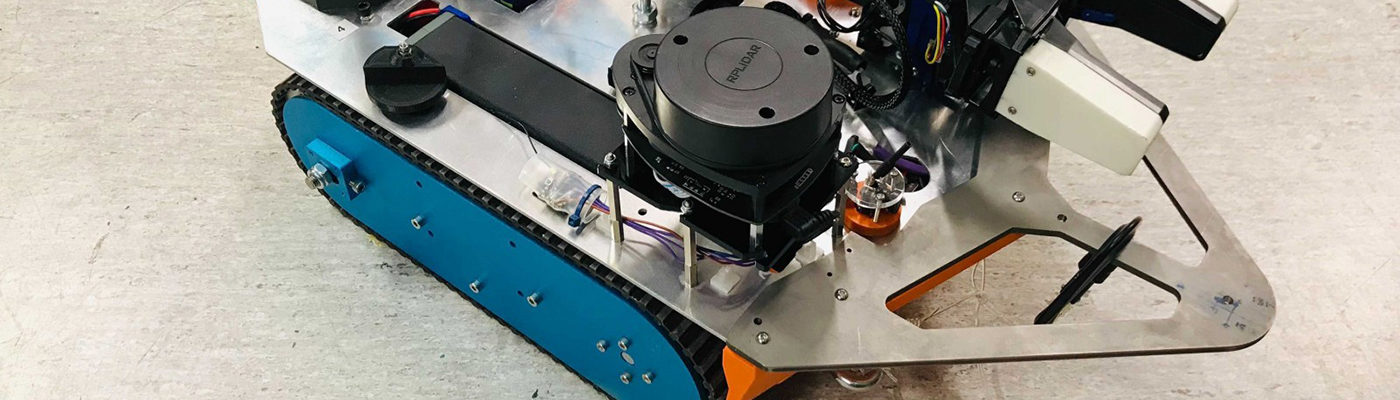
Produced by the Robotics and Artificial Intelligence for Nuclear (RAIN) Hub, a collaborative project led by The University of Manchester that includes nine other universities and the UK Atomic Energy Authority (UKAEA), Lyra is a mobile robot that has been designed as a low-cost ground surveying vehicle. Its recent deployment, to explore a 140-metre ventilation duct that runs underneath a central corridor between laboratories on the Dounreay site, was a great success.
Lyra’s package of five radiation detectors, able to measure beta, gamma, X-ray and neutron radiation, was used in combination with its two cameras, plus a laser scanning system that works in a similar way to radar, to build an accurate map of the duct.
Points of interest and areas of high radiation were identified and overlayed onto videos of the duct. Samples could then be taken from these specific areas by a manipulator arm attached to Lyra, to analyse the materials present and identify any that could affect the decommissioning process.
There were several potential threats to Lyra in the duct, particularly when it came to the radioactive environment. High levels of radiation, especially gamma radiation, can make most electronic equipment unusable. Luckily, this scenario “was very unlikely as this was not expected to be a high gamma environment”, says Professor Barry Lennox, a RAIN Hub researcher here at the University.
Despite this, the group took no chances, using “the University’s irradiation facilities at the Dalton Cumbrian Facility to test the resilience of the components on the robot. We were confident that it would be fine”, he adds.
The movement of Lyra and its manipulator arm was controlled remotely, reducing the risk of it getting stuck on rubble or debris in the duct. But failsafes, like an untethered winch retrieval mechanism and tracks that gave the robot a high ground clearance, meant Lyra was perfectly suited to the environment it found itself in.
On top of this, an independent, wireless reset device was added to Lyra in case a ‘hard’ reset was needed to save the robot. It is this attention to detail that ensured the RAIN Hub’s latest project was a success.
The Fukushima-Daiichi project
Lyra is the latest in a line of robots the RAIN Hub has developed to solve problems in the nuclear industry. Its four-year programme has carried out “numerous deployments of robots into active facilities in the UK and overseas”, achieving its key goal of “demonstrating robotics and AI technology to the nuclear industry”, according to Professor Lennox.
One such project has the potential to provide a solution to a challenge faced by clean-up teams at the Fukushima Daiichi nuclear power plant, which in 2011 became the site of the worst nuclear accident since Chernobyl 25 years earlier.
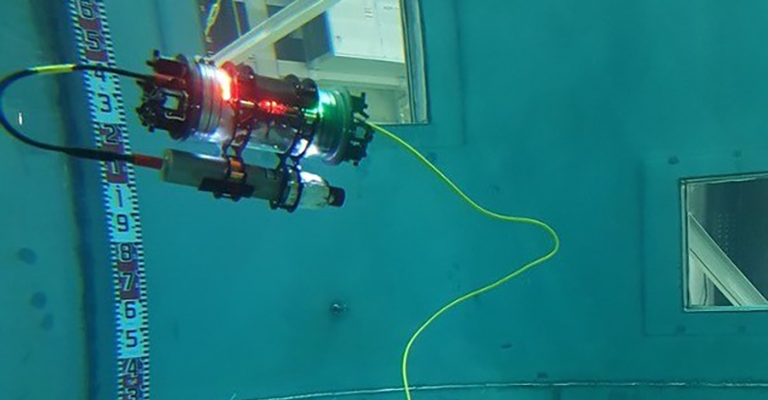
The Aqua Vehicle for Exploration and In-Situ Sensing (AVEXIS) is a submersible robot fitted with sonar and radiation-detecting equipment. Originally developed for use at the Sellafield nuclear plant in Cumbria, it is now the centre of a collaboration between the RAIN Hub, the Japan Atomic Energy Agency (JAEA), National Maritime Research Institute (NMRI) and Nagaoka University.
During the 2011 meltdown, nuclear fuel debris at Fukushima became scattered across the base of the primary containment vessel (PCV) of the reactor, a structure that succeeded in containing the debris and preventing it escaping into the environment.
As part of the clean-up operation, this debris now needs to be extracted from the submerged PCV; however, the exact location and composition of this debris is still unknown, making the process much more difficult. The hope is that AVEXIS will be able to precisely locate the debris in the underwater area.
Professor Lennox, a researcher on the AVEXIS project, says that “with support from our Japanese collaborators, we successfully demonstrated a working system at the Naraha testing facility, which is located a short distance from the Fukushima Daiichi power plant”.
The robot is made using off-the-shelf components and has no radiation shielding, so it will sustain damage from gamma radiation at Fukushima. But Professor Lennox predicts that “with the levels of radiation that we would expect to see at Fukushima, we estimate that AVEXIS would last a few hours of use, which should be sufficient for it to map the PCV for fuel debris”.
AVEXIS is currently being fitted with radiological sensors and improved control systems to help with the deployment. Mapping of the PCV at Fukushima by the robot would provide valuable information about the location and nature of the debris. Workers can use this data to reduce risk when decommissioning the site.
The future
Lyra and AVEXIS are packed with cutting-edge technology. However, they still must be controlled by human operators.
To push the capabilities of its robots even further, the team is also developing artificial intelligence programs that will allow robots to carry out tasks in inhospitable environments without human control.
“We have AI routines that enable our robots to autonomously explore environments and complete surveys while avoiding obstacles. And we’re developing techniques that allow our robots to detect when faults develop, autonomously account for this and return to a location from where they can be recovered”, says Professor Lennox.
“We have also developed techniques that enable the robots to avoid areas that contain high levels of gamma radiation – this should help extend the life of the robot.”
Professor Lennox and other researchers in the field are hoping to announce one or two large industry-supported programmes later in the year to continue their important work. New projects will also look to advance their submersible technology and, with the ALACANDRA project – which is investigating the best ways to use robots to clean up radioactivity – improve their ability to accurately survey three-dimensional and scattered radioactive hotspots.
These are exciting, important developments as researchers look to – finally – prevent humans from having to work anywhere near these dangerous, high radiation environments.
If you enjoyed this post, be sure to subscribe on our homepage to keep up to date with the latest posts from The Hub.
Words: Joseph Cousins
Images: The University of Manchester, Shutterstock, RAIN Hub
Dalton Cumbrian FacilityDalton Nuclear InstituteElectrical and Electronic Engineering